Drilly - the first mobile drilling robot

Project name: Drilly1 - Mobile Drilling Robot
Time period: 2013 – 2018
Partners: Vintervoll
Governmental funding: Innovasjon Norge
The core concept
Addressing a challenging task presented by electrical contractor Vintervoll, nLink embarked on a mission to alleviate the strain on workers engaged in the laborious and potentially hazardous task of installing light fixtures on expansive concrete ceilings, a task often plagued with time-consuming efforts.
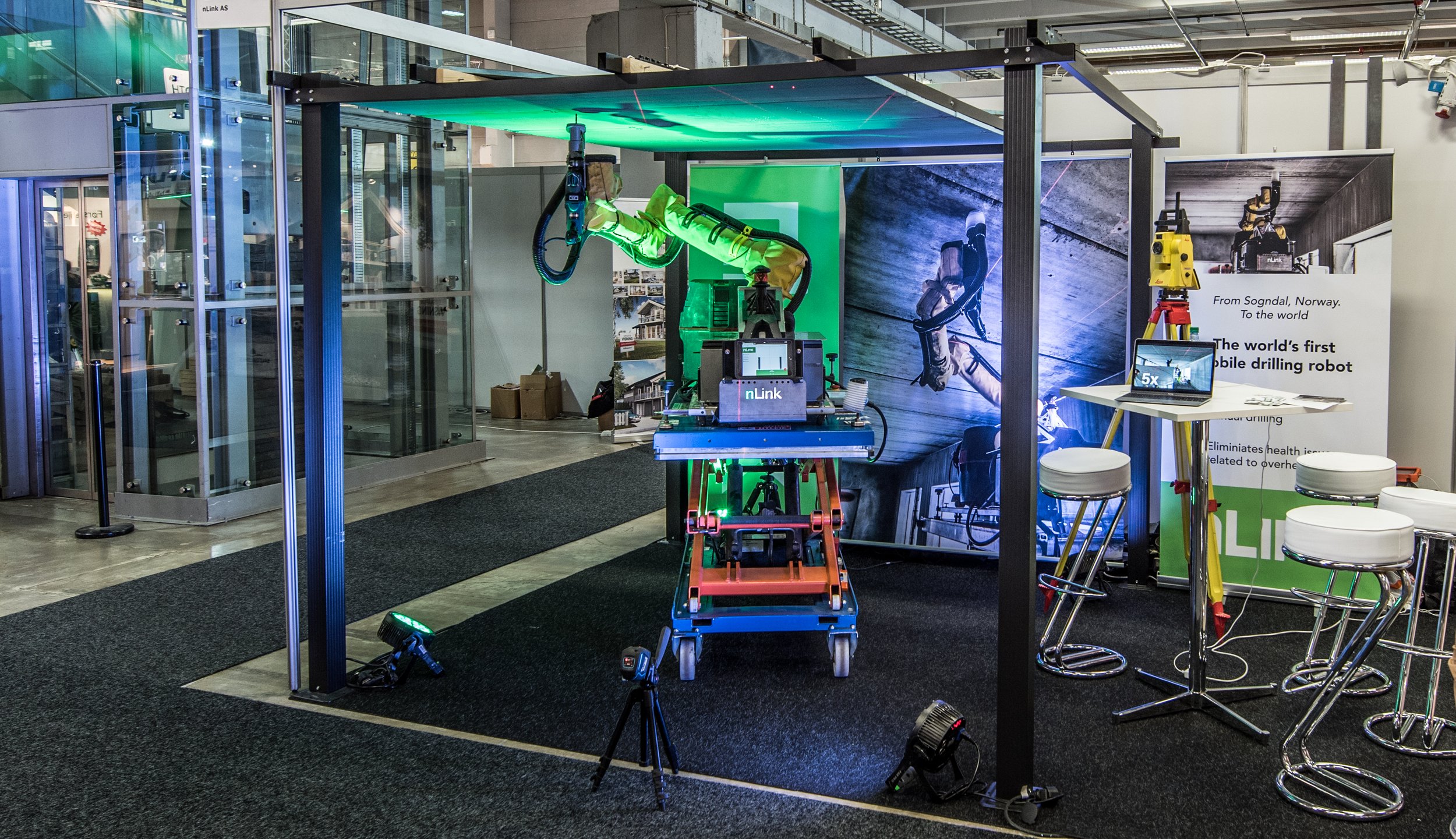
Our solution was to introduce the Drilly1 Mobile Drilling Robot - a groundbreaking innovation back in 2013 - and probably the worlds’s first mobile drilling robot in service at construction sites. Simply put, we mounted a robot arm onto a framework compatible with commonly available scissor lifts. This sophisticated arm, equipped with a basic drill fixture, revolutionized the drilling process.
To empower seamless operations, we developed an integrated vision system. This enabled the robot to intelligently identify the ceiling structure while utilizing a visible line-laser. Through a user-friendly app interface, a worker could effortlessly guide the robot, aligning its drilling precisely in accordance with the laser delineation. This not only ensured accuracy but also established a robust level of trust in the robot's performance.
Recognizing the need for mobility, we sought to overcome challenges posed by the scissor lifts' susceptibility to soft ground impediments. Our solution involved integrating an electrical undercarriage, the Alitrak DCT450, effectively rendering the Drilly1 a 'Mobile Drilling Robot.'
While a single individual couldn't transport the robot to the construction site or position it under the ceiling independently, our streamlined setup allowed for swift deployment. Within a mere 30 minutes, the robot could be initiated, mapped to the site's specific coordinates, and commence hole production.
Between 2013 and 2018, our endeavors saw us visiting over 25 diverse construction sites. Throughout these engagements, we successfully drilled over 30,000 holes, a majority of which facilitated the installation of crucial components in various commercial construction projects.
Challenges we solved
Robust robot arm manipulation of rotary hammer drill
Mapping robot to construction site coordinate system
Mobility on a construction site
User interface to robot operator with map of holes
Dust removal of drilling dust
BIM (Building Information Modeling) app to automatically generate drilling holes
Overnight battery charging procedures to ensure efficient daytime operation
Upgraded threads in robot arm to withstand vibrations from rotary hammer
Web interface showing live work progress
BREEAM (Building Research Establishment Environmental Assessment Methodology) compliance
Results
The immediate impact of introducing the drilling robot, was the elimination of subcontractors' exposure to harmful elements such as vibrations, noise, dust, and the risk of falls or injuries while working on ceiling installations.
As a direct consequence of removing the overhead drilling burden from those involved in electrical installations, ventilation, piping, sprinkler systems, and dropped ceilings, these specialized trades could redirect their efforts towards value-adding tasks, primarily focused on efficient installations.
Remarkably, the Drilly exhibited an exceptional capacity, drilling over 500 holes within a single workday, all achieved without any residual drilling dust. To accomplish this, we engineered a 3D-printed vacuum hose adapter perfectly tailored to encase the drill, enabling the collection of up to 10 kg of drilling dust during rigorous testing periods.
Beyond efficient drilling, our endeavor extended into seamlessly integrating the digital plan throughout the entire process, from Building Information Modeling (BIM) to the installer. This necessitated a harmonious fusion of steady drilling proficiency, precise positioning, and eliminating inter-trade clashes, thereby minimizing human error in measurements. The result? Elevated construction site productivity with an emphasis on right-first-time performance.
The success was not limited to operational efficiency. We developed a comprehensive digital workflow that was both traceable and predictable, empowering project planners to strategize with tighter critical deadlines. This innovative approach facilitated faster construction timelines, enhanced quality, and real-time automatic documentation of as-built structures, leading to remarkable improvements in the construction process.
Before establishing complete viability across the value chain, a final hurdle loomed: integrating drilling points directly into a BIM file. Previously, planning and engineers faced heightened workloads, compelled to meet the intricate demands of the robot's precision.
Eager to surmount this challenge, our culminating project in 2018 (commissioned by Norwegian contractors Mesta and Statsbygg) culminated in the development of an app. This innovative tool assimilated best practices from installers' manuals, automating the placement of hangers. What previously demanded days of an engineer's labor for each trade, our app accomplished within minutes.
At times, the cycle of hanger placement and drilling plan generation surpassed the time engineers required to update the BIM-kiosk accessed by installers! We willingly assumed accountability for any potential mishaps, confident in both our product and the established processes.
Our strong belief in the product and our expertise in digital workflow gave us the confidence to take on this responsibility. Drilly, in paving the way for viable robotic construction worldwide, solidified our commitment to transformative advancements in the industry.
Collaboration with Hilti
In 2015, our work with Drilly caught the interest of major construction companies in Europe, the USA, and Hong Kong. By 2017, an exciting collaboration emerged as we partnered closely with Hilti AG.
The Drilly robot and our affiliated nLink subcontractor drilling service concluded with our final project in 2018. From thereon, our focus shifted towards industrializing an advanced, scalable drilling robot later known as Jaibot.