Robodecom - monitoring radioactive contamination

A mobile robot for monitoring radioactive contamination.
Project name: Robodecom
Time period: 2019-2022
Partners: IFE, SINTEF, Allinvent, Createc, Tecnubel and Magics
The core concept
Robodecom is a project defined as “Robotic and digital technology-based innovation for decommissioning of nuclear and other installations”. The project is to investigate and demonstrate how to use available robotic technology to classify building material as part of decommissioning of nuclear power installations. Classification is a confirmation of whether the material poses a radioactive risk or not. If radioactivity is not detected, the material can be treated as ordinary construction waste.
Only in Europe, there are dozens of nuclear power plants that will be decommissioned in the next few years. Classifying building material more efficiently could not only reduce costs, but any robotic system employed in the process would also greatly contribute to digitalization of the industry. This again will lead better control and a direct link between planning, execution and documentation, which in turn increases value.
Our role
Our role is to supply the project with a modular, ROS-enabled tracked platform used to deploy radiological sensors designated positions inside a physical environment. The positions are chosen and managed in a digital environment based on BIM, before being transferred to the robot wirelessly. Based on prior knowledge about the layout, combined with SLAM and obstacle avoidance the platform can make its way to the area needing classification. Our previous experience with construction also make us a preferred partner on robot task management and BIM-integration.
Nlink have the role of project owner and source of knowledge on ROS, BIM, task management and robot arm positioning.
Challenges we solved:
Robust SLAM algorithm for localization in environment with few identifiers, such as in a construction site before walls and other significant identifying structures are in place or in a site during late stage commissioning.
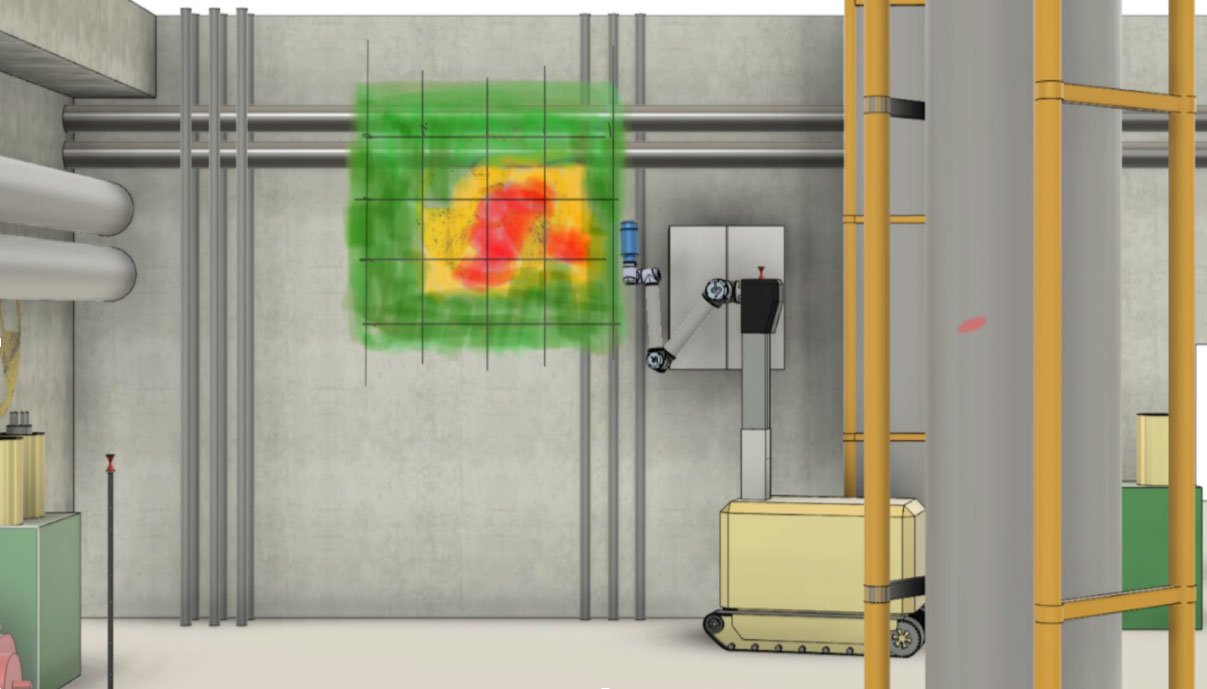
Result
A mobile robot able to position a radiological classification sensor at a given position in a physical environment that is also represented in a digital twin.